编辑推荐:
本研究针对微型磁控软体机器人因个体尺寸限制导致的病灶覆盖不足问题,受鱼类迁徙觅食行为启发,开发了具有仿生游动能力的鱼形磁控软体机器人集群系统。通过利用振荡磁场频率趋近机器人固有频率时恒定分量主导游动方向的特性,实现了全局磁场驱动下的个体差异化方向控制,使集群能够主动定向聚集至靶向病灶区域,并在抵达后通过形态自适应附着实现高效药物递送。该工作为微型机器人集群在生物医学领域的应用提供了新技术路径。
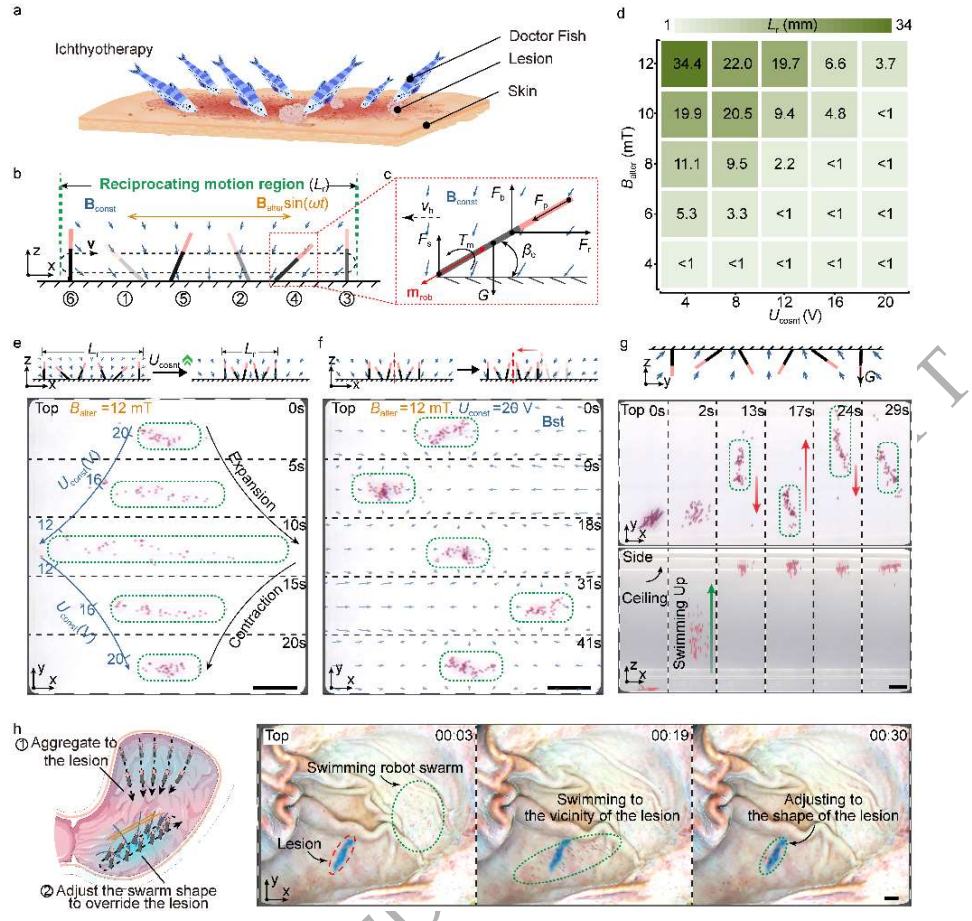
 Balter=3mTand 9mT, the average Fimp-yon a single robot over one cycle is-0.061 μNand-1.749μN, respectively.(g) The simulation result of the velocity magnitude(colored map) and velocity vector field(black arrows) around two robots during a motion cycle at Balter=3 mT and 9 mT. A larger alternating component results in faster fluid flow and greater impact pressure. Scale bar, 1 mm.(h) Feasible domains of magnetic field parameters for swarm coordination(spaces highlighted by red lines).'>
Balter=3mTand 9mT, the average Fimp-yon a single robot over one cycle is-0.061 μNand-1.749μN, respectively.(g) The simulation result of the velocity magnitude(colored map) and velocity vector field(black arrows) around two robots during a motion cycle at Balter=3 mT and 9 mT. A larger alternating component results in faster fluid flow and greater impact pressure. Scale bar, 1 mm.(h) Feasible domains of magnetic field parameters for swarm coordination(spaces highlighted by red lines).'>
生物通 版权所有





