编辑推荐:
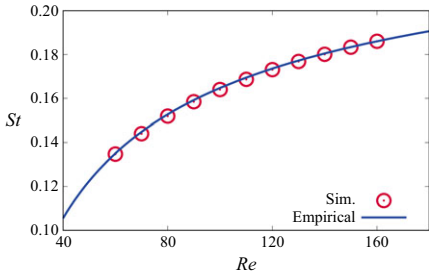
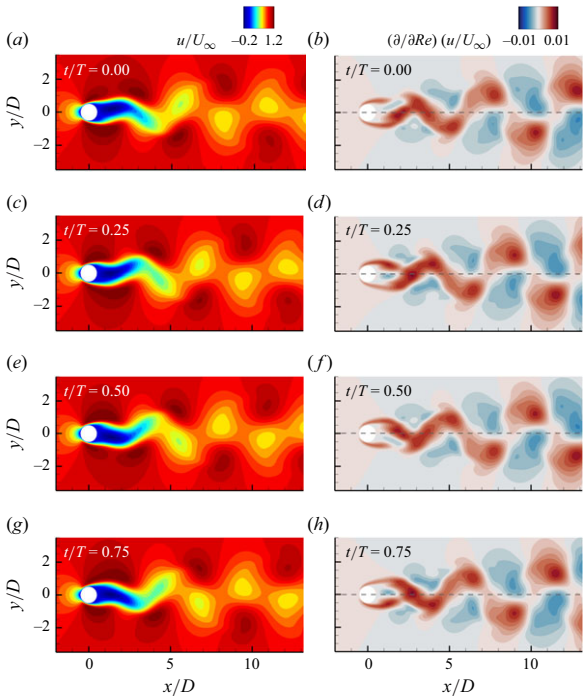
本文针对流体力学中参数化降阶建模(ROM)的挑战,提出了一种基于Grassmann和Stiefel流形的几何框架。研究人员通过分析圆柱绕流在变雷诺数(Re)和旋转率(α)条件下,探究了本征正交分解(POD)模态及其张成子空间对参数变化的敏感性。研究发现子空间敏感性的倒数与罗斯科数(Ro=Re·St)成正比,并在接近临界雷诺数(Re≈31)时趋于无穷,这与卡门涡街存在的下限吻合。研究还通过Stiefel流形上的敏感性模态可视化流场变化,并基于Grassmann流形子空间插值构建了高精度的参数化POD-Galerkin ROM。该工作首次将流形几何特性与流体物理现象直接关联,为复杂流动的参数化建模提供了新范式。
生物通 版权所有





