编辑推荐:
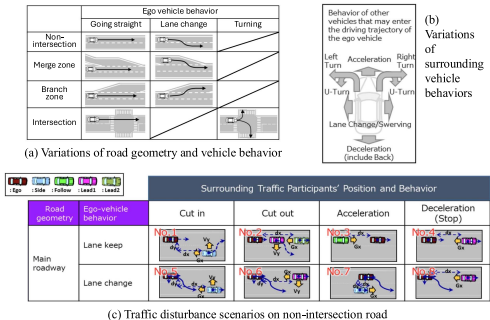
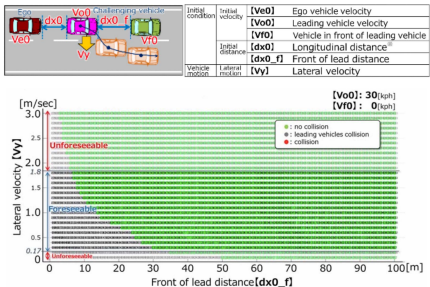
本研究针对自动驾驶系统(ADS)在仿真测试中面临的交通参与者行为建模难、实时数据采集不全、安全要求验证不足等问题,提出了集成AWSIM-Script场景描述语言、Runtime Monitor运行时监控器和AW-Checker属性检查器的仿真验证框架。通过日本汽车制造商协会(JAMA)安全标准系统评估Autoware在切入/切出/减速等交通扰动场景下的表现,发现其高速工况下碰撞避免能力未达到谨慎人类驾驶员基准水平。该研究为ADS的标准化安全验证提供了可复现的技术路径。

生物通 版权所有





